
I though the idea was patent worthy (and to be fair it probably is "novel") however from speaking with someone academic expertise, and forming my own views on the abuse of the patent system by "patent trolls", I came to conclusion that patenting this idea would not be the best path forward. It's rough, unfinished, and needs work / grit.
In lieu, I want to put it out in the world, so that if someone smarter than me stumbles upon it, they may be able to do something with it, and hey: if you are that person, and want help implementing the idea - get in touch! All work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Flowchart seen below is here - using the excellent Raptor flowchart programming software.
Summary of the Invention
A vehicular power / acceleration control interface, with appropriate programming to the vehicle’s engine management unit, whereby the throttle pedal input device travel indicates required road power/autonomous traffic flow participation mode, and desired rate of change of power output, rather than directly modulating engine power output. This is coupled with a driver feedback mechanism that is either direct such as the accelerator pedal input device incorporating three differently defined operating ranges in the pedal travel, to give instant feedback to the driver as to the effect their driving has on fuel efficiency, through pedal travel detents, or indirect such as a gauge or light array to indicate rate of acceleration, operating parameters etc., or, and whether the driver is participating in autonomous traffic flows.
Inventor
Inventor
Darragh Rogan CEng MIEI, Dublin, Ireland
Date
Date
11th March 2015
Description of the preferred embodiment
Description of the preferred embodiment
The engine management unit is programmed to recognise where in the pedal motion the pedal is (like a standard vehicle pedal) but with the enhancement that regardless of what speed you are travelling at, the pedal always operates in the same manner. This enhancement is put forward to offer drivers a simplified method of using vehicle technology as it exists presently, and the future in the case of autonomous vehicles, whilst leveraging a well established physical hardware interface.

As shown in the figure above, two detents are placed in the pedal travel, in order to define three distinct ranges of motion. These detents shall be sufficient that the driver can easily maintain the pedal at the threshold between each range of motion, and they shall not excessively impede the motion of the pedal in either it’s forward or sprung-back motion.
Crawl Mode
When at standstill, pushing the pedal within the first range of motion, the crawl range, will directly align the degree of pedal travel to a particular speed, appropriate to when driving in traffic or parking, similar to the hill ascent/descent mode described by Land Rover in their patent EP0983894B1. Once the driver exceeds this speed by moving into the second range of travel, this first range of travel reverts to the engine braking range, and is described later.
When at standstill, pushing the pedal within the first range of motion, the crawl range, will directly align the degree of pedal travel to a particular speed, appropriate to when driving in traffic or parking, similar to the hill ascent/descent mode described by Land Rover in their patent EP0983894B1. Once the driver exceeds this speed by moving into the second range of travel, this first range of travel reverts to the engine braking range, and is described later.
Between the first range of motion and the second is the efficient cruise position, described below.
Once the pedal is brought into the second range of motion, the car will accelerate, in an efficient manner. This is defined as the efficient acceleration range. The power output of the engine over the course of the pedal travel in this efficient acceleration range should be ranged evenly from the current steady state speed power requirement (to achieve the present vehicle speed) to the maximum efficient acceleration rate.
Maximum Efficient Acceleration Rate
The precise embodiment of what the maximum efficient acceleration rate is can be derived in a number of ways.
The precise embodiment of what the maximum efficient acceleration rate is can be derived in a number of ways.
In the simplest form, it is derived as a “capped” power output from the engine, whereby the engine is prevented from operating in an inefficient part of it’s power to rotation graph.
In SI units (listed in parentheses after each statement), the max efficient acceleration range for the pedal travel is defined as:
Max Efficient Acceleration Possible (m/s^2) =
Available Efficient Power to accelerate (w) / Vehicle Mass (kg)
where
Available Efficient Power to accelerate (w) =
Defined Highest Efficient Power (w) - Total Instantaneous Power (w)
where
Defined Highest Efficient Power (w) =
a defined engine power output at which the engine is operating at its peak efficiency e.g when the fuel flow per kW produced is lowest / BSFC is highest.
This should be defined by the engine manufacturer, either in absolute terms of output power, or based on other parameters such as particular fuel flow rate to account for engine efficiency decline over time between service intervals.
Total Instantaneous Power (w) =
Present engine power demands, which can be either measured by other (more accurate) means, or can be defined more generally as the sum of:
Tyre power (w) + Wheel bearing power (w) + Aerodynamic power (w) + Uphill power (w) + Parasitic power (w)
where
Tyre Power (w) =
Rolling resistance coefficient fr * Vehicle Mass (kg) * Gravitational acceleration (m/s^2) * instantaneous road speed (m/s)
Wheel Bearing Power (w) =
Bearing friction coefficient u * Vehicle Mass (kg) * Gravitational acceleration (m/s^2) * [Bearing bore diameter d (m) / Wheel diameter D (m)] * instantaneous road speed (m/s)
Aerodynamic power (w) =
0.5 * Air density p (kg/m^3) * Body shell frontal area (m^2) * Aerodynamic drag coefficient cx * [instantaneous vehicle speed (m/s)]^2 * instantaneous vehicle speed (m/s)
Uphill power (w) =
0.01 * Vehicle Mass (kg) * Gravitational acceleration (m/s^2) * Incline gradient of the road (%) * Instantaneous speed (m/s)
Parasitic Power (w) =
Electrical loads (battery charging + in car entertainment, lighting etc.), shaft takeoffs from engine fans, air conditioning, power steering pumps, power train friction etc.
It is important that the engine constantly calculates the max efficient acceleration during the period of acceleration, so that the rate of acceleration is seen to slow as the vehicle approaches maximum efficient cruising speed (as defined below).
Two alternative approaches to defining this efficient acceleration pace would be to consider the vehicle’s place in a wider traffic system.
It is possible to standardise the acceleration rate to match that used by either regulatory bodies when assessing fuel consumption figures e.g. The New European Driving Cycle or the worldwide harmonised light vehicles test procedures - this standardisation would ease traffic flows if all drivers were to accelerate at the same rate.
Alternatively in the case of semi-autonomous vehicles, the vehicle’s efficient acceleration rate could be optimised by the traffic conditions around it, whereby machine to machine communications occur to agree a pace of acceleration, or the vehicle tracks the speed of the vehicle in front, so as to accelerate at the same rate (provided the rate of acceleration of the vehicle in front is suitably efficient per the parameters of the vehicle). This mode would be particularly effective in application when driving onto a motorway on ramp from a slower road.
Regardless of particular derivation of the efficient acceleration rate chosen, this acceleration will be a gradual increase of speed, and the rate can be controlled depending on where the pedal is, but the engine will do this in the most efficient manner possible. Once the desired speed is reached, the pedal should be brought back to the cruise point, whereby the speed / power output will be maintained.
Efficient Cruise
Between the first and second ranges of motion of the pedal is the efficient cruise position. There is a pedal travel detent at this point, to inform the driver that they are at the efficient cruise position.
Between the first and second ranges of motion of the pedal is the efficient cruise position. There is a pedal travel detent at this point, to inform the driver that they are at the efficient cruise position.
The efficient cruise speed is defined by the driver, depending upon the speed at which they enter the efficient cruise position from e.g. from the first range of motion, or from the second range of motion. Should the driver then wish to change the speed they are travelling at, they should move the pedal to either the second range of motion to accelerate, or first range of motion to decelerate, and then back to the efficient cruise position in order to hold that speed.
The applicable engine output range for the efficient cruise position is at the lower end the power required for max crawl speed, and at the upper end the fastest speed at which the vehicle’s Total Instantaneous Power (w) equals the Defined Highest Efficient Power (w), both as defined above.
Whilst the the pedal is at the cruise position,the engine management unit shall ensure that the vehicle is maintained at the speed defined by the driver when they entered the efficient cruise position, including if engine load drops e.g. due to a decline, or if engine load increases due to an incline, similar to how conventional cruise control operates, however it should not increase the engine output into inefficient operation beyond the Defined Highest Efficient Power (w) as defined above.
In the case of semi-autonomous vehicles, the presence of the pedal in the cruise position should be used to indicate the driver’s preference to travel in a semi-autonomous convoy, e.g. at the same speed as the vehicle in front, provided that the vehicle in front is travelling at a speed which is deemed efficient per the parameters of the vehicle.
The presence of the pedal in the efficient cruise position can also indicate the driver’s willingness to have their speed adjusted based on local speed limits, if this information is available to the vehicle e.g. through location/speed limit mapping, signage visual recognition systems, or broadcast systems.
Super Cruise
Between the second and third ranges of motion of the pedal is the super cruise position. There is a pedal travel detent at this point, to inform the driver that they are at the super cruise position.
Between the second and third ranges of motion of the pedal is the super cruise position. There is a pedal travel detent at this point, to inform the driver that they are at the super cruise position.
Similar to the efficient cruise position described above, The super cruise speed is defined by the driver, depending upon the speed at which they enter the efficient cruise position from e.g. from the second range of motion, or from the third range of motion. Should the driver then wish to change the speed they are travelling at, they should move the pedal to either the third range of motion to accelerate, or first or second range of motion to decelerate, and then back to the super cruise position in order to hold that speed.
Note that if the pedal is brought to the "super cruise" point, between the second and third ranges of motion, the car will accelerate, in an efficient manner to its fastest efficient cruising speed - this shall nominally be the speed at which the Total Instantaneous Power Requirement = Defined Peak Power figure, as defined above, inclusive of non speed related parasitic power train loads.
Alternatively, the super cruise speed could be a set figure from one of the standardised driving cycle tests such as 100kmh from the NEDC, (in order to standardise on cruising speeds in large traffic flows) - this mode would be very useful for long distance motorway cruising where fuel consumption can jump up due to the energy required for such driving.
Whilst at the super cruise position, the engine management unit should ensure that the vehicle is maintained at that speed, including if engine load drops eg due to a decline, or if engine load increases out of efficient cruise position due to an incline, similar to how conventional cruise control operates.
Again, as with the efficient cruise pedal position operation above, in the case of semi-autonomous vehicles, the presence of the pedal in the super cruise position immediately from moving off could be used to indicate the driver’s preference to travel in a semi-autonomous convoy, e.g. at the same speed as the vehicle in front, without concern that the vehicle in front is travelling at a speed which is deemed efficient per the parameters of the vehicle. Should this be used, it is important that consideration to emergency braking is afforded e.g. sufficient clearance be given to allow the driver react to the vehicle(s) in front emergency braking, or automatic braking of the vehicle. Should automatic braking be afforded, it would permit closer separation between vehicles, offering possibility to exploit an aerodynamic efficiency bonus by using the vehicle in front as a “wind shield”.
Once the pedal is brought into the third range of travel, the car will accelerate, in a much less efficient manner (e.g. Full fuel flow variable valve timing mode in normally aspirated internal combustion engines, use of forced induction turbos/ supercharger in forced induction ICEs, combining both the ICE & hybrid battery source in hybrids, and using all available power sources in electric cars). Once the desired speed is reached, the pedal should be brought back to either the super cruise position to maintain that speed (should the speed be more than the fastest efficient speed) or to the cruise position (should the speed be less than the fastest efficient speed, or should the driver wish to slow to the fastest efficient speed).
Slowing Down
Once the driver wishes to slow, the pedal should be brought to the crawl range / motor braking range, whereby the rate of decrease of speed from the motor can be regulated, be that engine breaking in ICE cars, or rate of regenerative braking/battery charge in the case of hybrids or full electric cars. When sufficient engine braking has occurred, the car will proceed depending on the positioned the pedal, either if it is brought to the cruise position, or the speed defined by the position in the first range of travel.
Once the driver wishes to slow, the pedal should be brought to the crawl range / motor braking range, whereby the rate of decrease of speed from the motor can be regulated, be that engine breaking in ICE cars, or rate of regenerative braking/battery charge in the case of hybrids or full electric cars. When sufficient engine braking has occurred, the car will proceed depending on the positioned the pedal, either if it is brought to the cruise position, or the speed defined by the position in the first range of travel.
To facilitate emergency braking, the rate of release of the pedal should be used to indicate whether normal deceleration is desired (as described above), or whether engine braking (and even automatic braking if afforded in the particular vehicle) should be engaged immediately. This would be particularly useful in the case of travelling with the pedal in the super cruise position, where there is the largest rotation of the pedal required to engage the pedal to the engine braking mode. This function could also engage other emergency braking subsystems within the vehicle, as is commonly provided, such as operating hazard lights, activating aerodynamic braking aids etc.
It should additionally be provided that if the driver presses the brake pedal or engages the parking brake at any time, engine braking mode should be immediately engaged, regardless of pedal position.
Note that in the case of manual gearbox controlled cars (as opposed to automatic / single gear vehicles), providing there is no specific information to the engine management unit as to what gear the car is engaged in at a particular time, the car will have to make continuous judgements as to what gear the car is in, either by dead reckoning that the driver starts driving from first, changes to second etc., or by comparing the vehicle speed to engine speed. Knowledge of the gear will impact on the EMU’s chosen efficient driving range for a given speed.
When it comes to drive off from a standstill, it should be possible for the driver to simply release the clutch pedal, and the EMU should initially achieve successful forward or reverse motion, and then proceed to the speed set point indicated by the pedal position, at the rate of change of acceleration as desired. Similar to launch control as described in the motor racing industry, when at standstill, the position of the accelerator pedal could be used to produce standstill takeoff performance relevant to the pedal position e.g. in the efficient acceleration pedal range, an efficient, quiet takeoff should be provided, and if the pedal position is in the inefficient acceleration range, an appropriate takeoff should be provided, including integration with other vehicle subsystems such as gearbox/clutch for launch control, suspension etc.
When it comes to change gear, either for increasing speed, or slowing down, the EMU should adapt the engine revolutions per minute to align with the probable gear being changed into, whether that is changing up a gear or down a gear, to avoid undue clutch wear. The driver should signal to the EMU that they intend to change up a gear by having their pedal in the crawl range of travel, (only if travelling within the crawl speed), or by having their foot in either the cruise position, efficient acceleration range, super cruise position or in the inefficient acceleration range. In the event that the driver wishes to change down a gear, they should either move their foot to the engine braking / crawl range if travelling at a speed above the crawl range, or lift their foot off the accelerator altogether - the EMU should match the engine RPM accordingly.
Feedback to Driver
Feedback to Driver

In defining the operation of the driver's input to the pedal above, it is important to note that the driver should have feedback as to the effect of their actions. This feedback can either be indirect, or direct.
In indirect mode, a gauge, or an array of lights, should be provided to indicate the pedal position (to show what range of motion the pedal is in, and where in that range the pedal is). Auditory or vibration haptic feedback could also be used, however the particular embodiment should be cognisant of causing irritation, and the prevalence of deaf drivers.
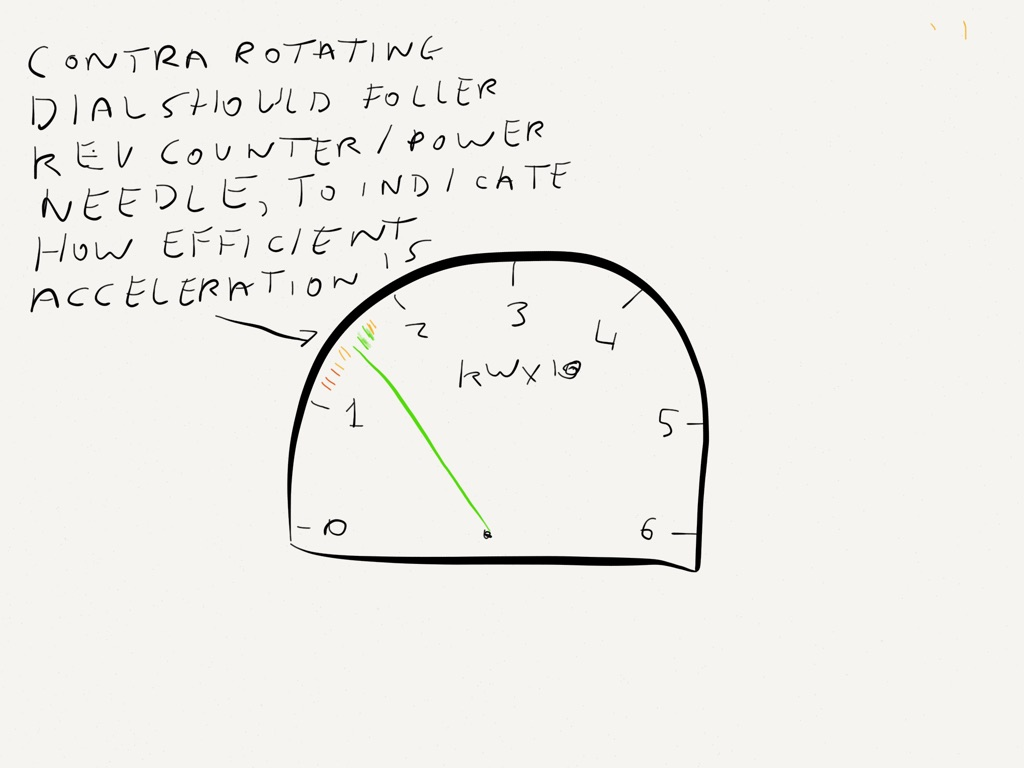
The figure above depicts modifications to the commonly used engine revolution counter & speedometer gauge driver feedback device. Note that the engine revolution counter can be substituted for power reserve meter as used in some vehicles, or any other method of displaying instantaneous power loading to drivers. Similarly, these modification shouldn’t be limited to just static, in instrument cluster gauges - these can apply to any visual feedback channel e.g. Head Up Display, or electronic overlay glasses.
Around the speedometer is depicted information on the optimal speed for efficiency purposes, by imposing coloured graduations, to show what speed is most efficient to drive at (calculated using present engine load profile, as described above). This display should be static (albeit recalculated per the present engine load profile). The driver should have this feedback to be aware of their steady state speed efficiency. By having this feedback, the driver can at a glance see if their speed (as indicated by the freely moving speed needle) is the most efficient, or to what degree from the most efficient it is. A proposed method of graduating the most efficient speed to least would be using the colours green to red (with orange in between) although any other visual graduation paradigm could be used (such as brighter to darker, larger lines to shorter, etc.)
In giving the driver feedback as to their speed, and its efficiency, the speed feedback apparatus should not unduly encourage to drive in a dangerous manner, in the pursuit of an efficient speed, for example, driving too slowly on a motorway, compared to typical motorway speeds, or driving too quickly in an urban street. Accordingly, it is proposed that upper and (where pertinent) lower speed markers be shown on the speedometer efficiency imposition, to indicate relevant speed limits (if that information is available to the engine management unit, per description of the efficient cruise pedal position above), both upper and lower in the case of motorways, and also the upper speed limits should be derated as necessary based on other relevant performance conditions that the engine management unit is aware of e.g. incorrect tyre pressure, use of spare tyre with speed restriction, detected increased weight of the car affecting stopping distance, downward incline giving rise to increased stopping distance, reduced brake performance if overheated, windscreen wiper rain sensor, outdoor temperature sensor, limp home mode etc.
To enable the driver get at a glance feedback of the operating mode presently employed, the present position of the needle against the speed efficiency gradient could have it’s colour repeated in some manner, e.g. by changing the colour of the needle itself, or the speed reading itself.
Around the needle of the rev counter / power reserve gauge, it is proposed to feedback to the driver the efficiency, or degree to which, they are accelerating. It should be borne in mind that this information is only relevant to the driver when they are changing the power output of the engine (as reflected in either the rev counter or power needle moving), so this information should only be displayed at that time, to reduce irrelevant clutter. When accelerating, wherever the needle is at that given time, around the needle should be graduated range, which follows the needle through it’s motion. This graduation should be from most efficient acceleration, to least efficient, and could be coloured or graduated similar to the speedometer efficiency range above, and the extent of this overlay should be reflective of the absolute acceleration that the vehicle is capable of within a defined timebase (regardless of speed). This gradiated range should follow the needle through its revolution, and should counter rotate slightly, with the degree of counter rotation dependant upon the rate of acceleration (most efficient acceleration to least efficient acceleration). In this manner, the driver can see instantly how efficient their chosen rate of acceleration is. When the vehicle is decelerating, as the needle counter rotates, the gradient should rotate, to indicate engine braking, and if relevant, regenerative power capture efficacy.
As with the speedometer feedback, the degree of acceleration shown by the rev counter / power meter feedback should indicate any derating factors if relevant e.g. if the engine is warming up with acceleration limited, poor traction conditions resulting in limited acceleration potential, limp home mode is active, or when decelerating, if the vehicle is on an incline, or if the regenerative battery has no further capacity, etc.
To enable the driver get at a glance feedback of the operating mode presently employed, the present position of the needle against the rev counter / power meter efficiency gradient could have it’s colour repeated in some manner, e.g. by changing the colour of the needle itself, or the power reading itself.
Another method of non visual feedback should be provided, to inform the driver of powertrain limitations, such as reaching the fastest efficient cruise speed, if the driver is accelerating to this setpoint - this could be achieved by momentarily interrupting the acceleration of the vehicle as it nears it’s fastest efficient cruise speed. This would be perceived by the driver as a shudder, and would establish itself as a solid feedback to the driver.
Direct feedback (of pedal motion) could also be used, whereby springs or some other similar means are used to define the three ranges of motion of the pedal, as described in patent DE4305737A1 which has the advantage of giving the driver points at which to "rest" their foot when in either cruise or super cruise mode. This multi spring approach would also be suitable to hand propelled accelerators, and in both foot pedal and hand pedal applications, has the benefit of not requiring the driver to focus attention on secondary information.
The EMU should always incorporate the various safety systems that are present on modern vehicles regarding the acceleration pedal e.g. Traction control - the use of a speed set point adjustment pedal as opposed to an engine power output (traditional) pedal should not break this convention.
Conclusion
The above use of the pedal ranges of motion relating to the accelerator function will give the driver a much greater sense of control over their engine, and in doing so, they will have instant feedback about how their driving style impacts on energy consumption, in a tactile fashion. This feedback to people will discourage drivers from rapid accelerations unless they need it, and will allow people maintain a speed instead of waves of speed up/slow down/speed up. This will also have minor safety improvements, as if people are less inclined to accelerate much, there will be less risk taking. It will also be possible to switch on and off this mode of operation through the engine management unit to suit driver preference should they not wish to use this mode, and revert to the traditional method of using the pedal to modulate engine power output more directly.
The above use of the pedal ranges of motion relating to the accelerator function will give the driver a much greater sense of control over their engine, and in doing so, they will have instant feedback about how their driving style impacts on energy consumption, in a tactile fashion. This feedback to people will discourage drivers from rapid accelerations unless they need it, and will allow people maintain a speed instead of waves of speed up/slow down/speed up. This will also have minor safety improvements, as if people are less inclined to accelerate much, there will be less risk taking. It will also be possible to switch on and off this mode of operation through the engine management unit to suit driver preference should they not wish to use this mode, and revert to the traditional method of using the pedal to modulate engine power output more directly.